QZSMC6000�������c(di��n)
�� ֻ��һ�_���I(y��)��X�Ϳ��Ԍ�(sh��)�F(xi��n)�߶��`���\(y��n)�ӿ�������ȫ�[ÓӲ���������Ϳ��ƿ���
�� �Ɍ�(sh��)�F(xi��n)32�S��32ͨ�����ƣ�0.5ms�ŷ��������ڣ�500����API�\(y��n)�ӿ��ƺ���(sh��)����(sh��)�F(xi��n)���N��(f��)�s܉�E���ơ�
�� ��Windows���\(y��n)�У�ͨ�^��(sh��)�rϵ�y(t��ng)���Cus��Ӳ��(sh��)�r����(w��n)���Ա��C��
�� ����EtherCAT��վ������ıO(ji��n)ҕ������������߀����ʹ��EtherCAT�W(w��ng)�j(lu��)����APIֱ�ӌ���վ�M(j��n)�в�����
�� ��ͬ�r�����_�Ԅӻ��O(sh��)����I(y��)�C(j��)�����M(j��n)�Ѕf(xi��)ͬ��Ч���ơ�
�� �m���ڸ��N3C��ӣ��֙C(j��)�M�b�yԇ���NƬ�����b��늳ص��Ԅӻ��O(sh��)��Ŀ��ƣ�����(n��i)������O(sh��)�������̵��x��
�a(ch��n)Ʒ��(y��u)��
1.��(chu��ng)���Ժͽ�(j��ng)��(j��)��
�� �o�谺�F�Č���̎��оƬ��ܛ���\(y��n)�ӿ��ƿ����p�Ɍ�(sh��)�F(xi��n)��(f��)�s�ĸ��N�㷨��ͨӍ
�� �o���κ��\(y��n)�ӿ��ư忨��ܛ���\(y��n)�ӿ��ƿ��ڃ�(n��i)�����M(j��n)�ж��S�ĸ����ܵ��]�h(hu��n)�㷨
�� ��С����ͨ��Ӳ�����Ԏ����@����Ҋ�Ľ�(j��ng)��(j��)�ԣ��Լ����Ľӿں;��|������^�ٹ�����
�� ���b�ͼ���ʮ�ֺ����ݣ����ٮa(ch��n)Ʒ���Еr�g
2.��(qi��ng)�������
�� ��ְl(f��)�]Ŀǰͨ��CPU�ij����١������_(�p���ȸ��c(di��n)�\(y��n)��)���\(y��n)������
�� �S��CPU���ٶȺ����ܵ���ߣ�ܛ���\(y��n)�ӿ����㷨�ٶȺ�����Ҳ�S֮���
�� �\(y��n)�ӿ��ƃ�(n��i)����Ɍ�(sh��)�r�����]�h(hu��n)�㷨��ǰ����·��Ҏ(gu��)�������a(b��)���Ӝp���������a(b��)����ƽ���ȹ���
�� �\(y��n)�ӿ��ƃ�(n��i)�˺�ܛPLC��(n��i)�˟o�p���ɣ��f(xi��)������
�� ֧�ֶ�N�\(y��n)�ӿ���ģʽ�ͱ�����x����
3.���ƻ��ͿɔU(ku��)չ
�� �ṩ�_��ʽ��ƽ�_���_�l(f��)�h(hu��n)�����Ñ����Ԍ�(sh��)�F(xi��n)��(d��)�صĮa(ch��n)Ʒ����������ļ��g(sh��)��(j��ng)�(y��n)��(g��u)�����\(y��n)�ӿ��Ʈa(ch��n)Ʒ
�� �Ñ����p�ɼ��ɵ������đ�(y��ng)�õ��y(t��ng)һ���\(y��n)�ӿ���ƽ�_�ϣ���ҕ�Xϵ�y(t��ng)����(sh��)��(j��)�졢�W(w��ng)�j(lu��)��(y��ng)�õ�
4.���ο��ٵ�ϵ�y(t��ng)����
�� ��?y��n)���С����Ӳ�����������B��ʮ�ֺ���
�� �ṩ�O(sh��)�Üyԇܛ��
�� ���Ƶļ��g(sh��)�ęn�͇��H�Եļ��g(sh��)֧��
�� �ṩ���N��(y��ng)��ʾ������
5.�`���Ӳ���M��
�� �`�������S��(sh��)Ŀ��IO�c(di��n)��(sh��)
�� �`���x�ø��NEeherCAT�����ŷ���IOģ�K
�� ���x�ø��Nͨ���}�_���ŷ������M(j��n)�ŷ�
�� ���x��EtherCAT�������S�(q��)������ģ�M��׃�l��
�� �ɿ��Ƹ��Nֱ��늙C(j��)��DD�R�_(d��)
�� ���x�ø��Nͨ�õ��@ʾ�����I�P���(bi��o)��PC���|������Ҳ���x��CNC��������ʾ��
���g(sh��)��Ҫ Technology
PLC��(n��i)��
�� PLC ��(n��i)���c�\(y��n)�ӿ��ƃ�(n��i)�˟o�p���ɣ��f(xi��)����(zh��)��PLC������
�� �c����PLCָ������ΈD߉���ݣ�
�� �ṩ�_���Եģ���(sh��)�r�����ܱ��C����������1-5ms��
�� �əz�y�\(y��n)�Ӡ�B(t��i)�Ͱl(f��)���\(y��n)��ָ��(PLC�S����)��
�\(y��n)�ӽ������(n��i)��
�� ÿ��1000������θ���̎����
�� �����\(y��n)��ָ��ĭh(hu��n)����پ��棻
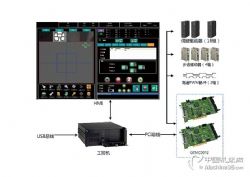
����ϵ�y(t��ng)
SoftMotionControler���\(y��n)�ӿ���ܛ��(������(sh��)�r��(n��i)��)�����\(y��n)����ܛ��˾��Windows XP��Windows 7��(32/64)���oՓ�Dz���߀���_�l(f��)��Windowsϵ�y(t��ng)���o���_�l(f��)�ߺ��Ñ���̵��m��(y��ng)���_�l(f��)���ڣ��ṩ�����ѺõIJ�������͵ĔU(ku��)չ�ԡ�
��(sh��)�r��ϵ�y(t��ng)
������֪��Windows�Ƿnj�(sh��)�r�IJ���ϵ�y(t��ng)����ͨ�^��(sh��)�rܛ��ϵ�y(t��ng)�����Ԍ�Windows�D(zhu��n)׃�Ɍ�(sh��)�r����ϵ�y(t��ng)��
ͨ�^�ڲ���ϵ�y(t��ng)�����ӌ�(sh��)�r�ģ���ռʽ�Ķ��΄�(w��)�C(j��)�ƣ�ʹ����Windows�¿��Ԍ�(sh��)�F(xi��n)��(sh��)�r������_�l(f��)�Լ�̎�������ܡ�Ӳ��(sh��)�r���Ե��P(gu��n)�I�΄�(w��)��Ӌ�r���ȿ��_(d��)1�롣�K�����t(IST latencies)С��10�롣��ˣ���һ�_��X�ϣ�����ϵ�y(t��ng)����ͬ�r�M(j��n)�Ќ�(sh��)�r�ͷnj�(sh��)�r���΄�(w��)̎��������Windows�M(j��n)�̟o�����挍(sh��)�r�M(j��n)�̵��\(y��n)�С�
�\(y��n)�ӿ��ƃ�(n��i)��
�\(y��n)�ӿ��ƃ�(n��i)��������ܛ���ܘ�(g��u)�Ļ��A(ch��)�c���ġ�λ�íh(hu��n)���ٶȷ����h(hu��n)�������\(y��n)�ӿ��ƃ�(n��i)�����M(j��n)���]�h(hu��n)����(����(j��)����ģʽ���ŷ��������ڵIJ�ͬ)���\(y��n)�ӿ��ƃ�(n��i)����Ɍ�(sh��)�r�\(y��n)�ӿ����]�h(hu��n)�㷨��·��Ҏ(gu��)�������a(b��)���Ӝp���������a(b��)����ƽ���ȹ��ܣ��\(y��n)�ӿ��ƃ�(n��i)�ˏĸߌӵ��Ñ���(y��ng)���н���ָ���ͨ�^������������ͽo�ŷ���IO�O(sh��)�䡣
| �����S��(sh��) | 64�S��16ͨ�� |
| ���a(b��)��� | ֱ�� (6 �S), �A�� (2-3 �S), ����(3 �S) |
| �Ӝp����� | ���Σ�S �Σ��Ӽ��ٶȡ����ٺ͜p�������ɆΪ�(d��)�O(sh��)�á� |
| �\(y��n)�ӿ��� | �c(di��n)�ӣ����㣬PTP��List Motion���B�m(x��)���_�^(q��)��(zh��)�У�֧���B�m(x��)���a(b��)�\(y��n)�ӣ��B�m(x��)���a(b��)���_�^(q��)���b5000 �lָ����B�m(x��)���a(b��)�\(y��n)����֧��1-6�Sֱ�����a(b��)�����S�A�����a(b��)�����Sͬ�ĈA���a(b��)�����S�����S���������a(b��)�����g�A�����a(b��)�����S���β��a(b��)���㷨��֧��Blend �ս�ƽ���^�ɡ�С����ǰհ���B�m(x��)���a(b��)��ͣ�ӕr��IO���Ƶȹ��� |
| ���d | ���\(y��n)���и�׃Ŀ��(bi��o)λ�ã�PTP�����ٶȣ�PTP / DVC���������������(sh��) |
| ͬ������(���Ŀ���) | �����32���������Ą��S֧�֣������T�S���� |
| ���a(b��)���� | Ĭ�J(r��n)1ms��������0.25ms-4ms�� |
| ֧�ֿ��Ʒ�ʽ | λ��/�ٶ�/�D(zhu��n)�أ�PID�]�h(hu��n)�� |
| λ���a(b��)������ | �ݾ��`���a(b��)���������g϶�a(b��)����ֱ�����a(b��)�����ض��a(b��)�� |
| ��I/O �c(di��n) | 11600/ 11600����1KB����֧�ֱ��������EtherCAT��վ�O(sh��)�� |
| ����UDI | �ɔU(ku��)չ4·��ͨ���M(j��n)늙C(j��)���ŷ�늙C(j��) |
| �¼�����(sh��) | �����¼���I / O���\(y��n)�ӿ��� |
| ��Ҫ��EtherCAT���� | COE��F(xi��n)OE��DC�ֲ��r犣���/��/������?f��)䣬���Σ��W(w��ng)�j(lu��)����API |
| ܛ��IO�|�l(f��)�i�� | �|�l(f��)�r�g0.5ms |
| ܛ��λ���|�l(f��)IO | �|�l(f��)�r�g0.5ms��֧��IO���r���D(zhu��n) |
| PVT���� |
֧�ֶ��_(d��)5000��λ���c(di��n)��PVT �\(y��n)������Ҏ(gu��)�������ܣ�����(j��)λ���c(di��n)���� �P(gu��n)��(sh��)��(j��)���r�g��λ�á��ٶȣ���(sh��)�F(xi��n)�ڜ�(zh��n)�_�ĕr�g�c(di��n)�Ԝ�(zh��n)�_���ٶȵ��_(d��)�_����λ�ã���ͨ�^�Զ��x��(sh��)��(j��)��(sh��)�F(xi��n)��(f��)�s܉�E���S�B�m(x��)���a(b��)�\(y��n)�ӹ��ܡ� |
| ��݆���� | ֧����݆�\(y��n)�����ù��ܡ�����������һ���S������S����ͬ�ı��ʸ��Sһ����݆�\(y��n)�ӡ��������ø��S�S����(qi��ng)����݆��(f��)�����ܣ����S���S��݆�Ɍ�(sh��)�F(xi��n)���S�f(xi��)ͬ���_��λ���ܡ� |
| �\(y��n)����IO���D(zhu��n) | ֧��IO ݔ���ӕr���D(zhu��n)���ܣ��Ɍ�(sh��)�F(xi��n)ݔ���}�_��̖���_���ƈ�(zh��)�ЙC(j��)��(g��u)�������磺�����C(j��)�ع�r�g���ƣ��c(di��n)�z�C(j��)���z�����Ƶȡ� |
��(y��ng)���I(l��ng)��
1��CNC��(sh��)���C(j��)��
2�����N�Ԅӻ��O(sh��)��
3�����I(y��)�C(j��)���ˌ�(sh��)�F(xi��n)�߿��ƾ��Ⱥ��ٶȵ�һ�w������
ע��(li��n)ϵ�ҕr��Ո�f���ڡ������C(j��)���W(w��ng)���Ͽ����ģ��x�x��